


Green Floor-mounted six-axis collaborative robot locking screw machine


Device Parameter
| Model | GR-XFXZ950 |
| Robot reach | 950mm |
| Robot end load | 16Kg |
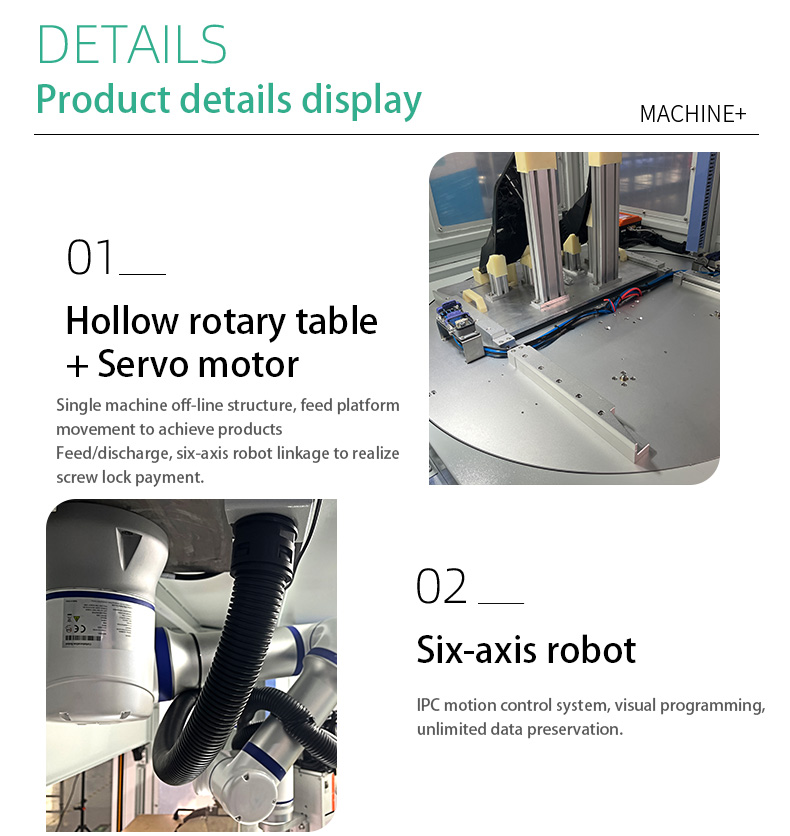
| Feeding platform | Central control rotary table+servo motor |
| Feeding method | Blow/a spirate are compatible |
| Lock-up yield | 99.95% |
| Working power supply | AC220V |
| Working air source | 0.4-0.7MPa |
| p ow e r | Approx 2.5KW |
| Set the coordinate method | Visual positioning |
| Outer demension (L*W*H) | 1400*1900*1950mm |
| Weight (KG) | 800 |
| Condition | New |
| Warranty of core components | 2 Years |
Device features
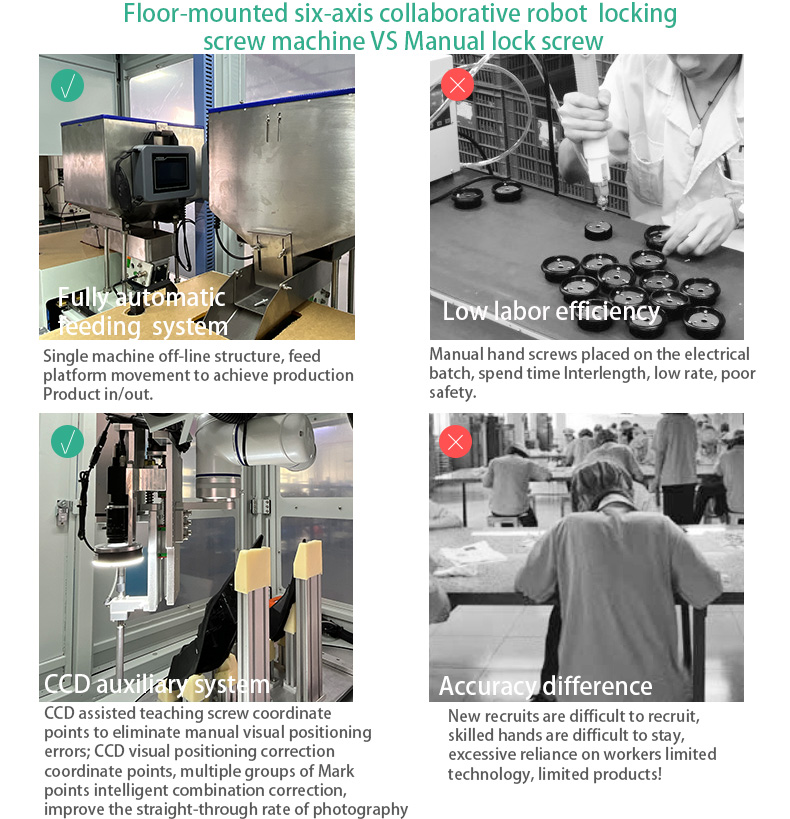
1.Single-machine off-line structure, feed platform movement to achieve product input/output, six-axis robot linkage to achieve screw lock payment
2.IPC motion control system, visual programming, unlimited data storage;
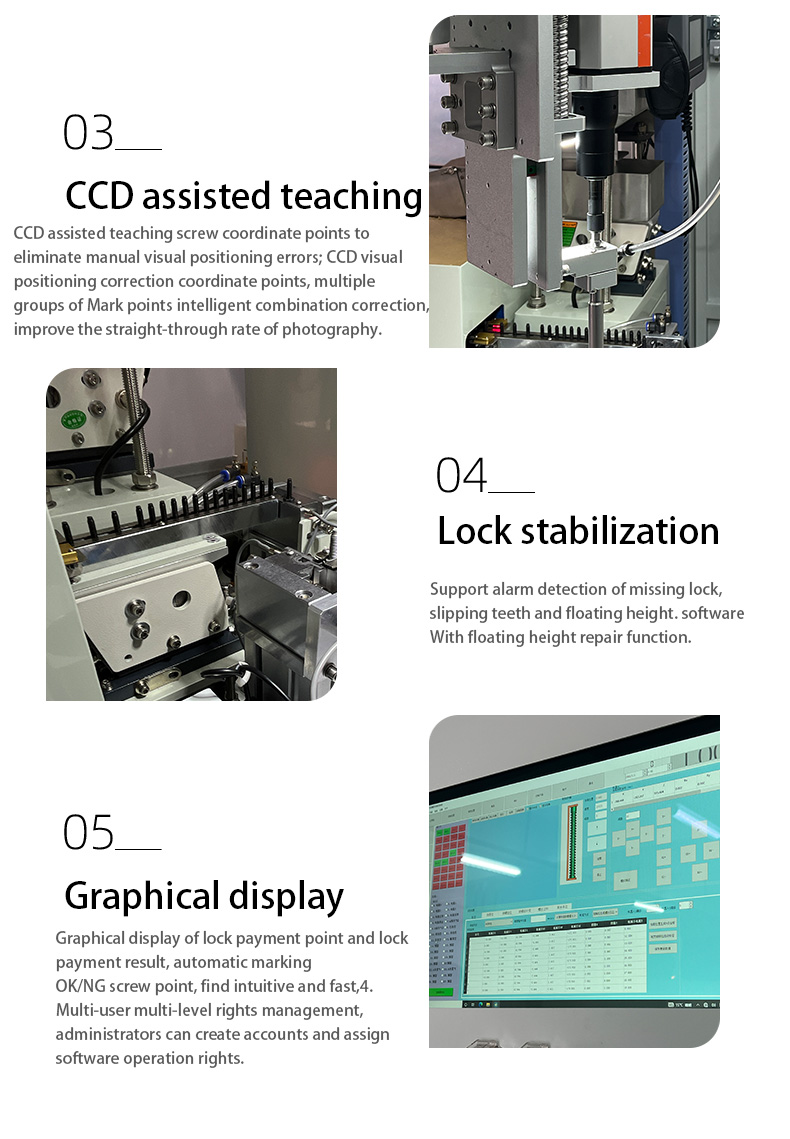
3.Graphically display lock pay point and lock pay result, automatically mark OK/NG screw point, find intuitive and fast;
4.. Multi-user and multi-level rights management, administrators can create accounts and assign software operation rights
5.CCD assisted teaching screw coordinate points to eliminate manual visual positioning errors; CCD visual positioning correction coordinate points, multiple groups of Mark points intelligent combination correction, improve the photo pass rate;
6.Support alarm detection of missing lock, slipping teeth and floating high. The software comes with floating height repair function;
7.Z-axis can be configured with laser displacement sensor (to measure floating height) and downpressure detection sensor (optional);
8.The electric batch can be equipped with HIOS electric batch, Qili speed electric batch, servo electric batch, intelligent electric batch, etc. (optional);
9.The equipment can upload MES according to customer requirements, such as torque, number of turns, Angle, torque curve, lock status.
10.Manual scanning and automatic scanning can be selected (optional)
11.. Production data can be traced, and the software comes with a quality control board. All kinds of data can be uploaded and downloaded (optional);
12. Automatic torque point check, store the torque point check results and query (optional).

Details


Products categories
-

High quality Green Eight Shaft Automatic screw ...
-

Precision Fixing Screw Fastening Machine Screwd...
-

Green Desktop Four-axis Adsorption Visual Lock ...
-

High efficiency Desktop four-axis air-blown scr...
-

Green Automatic Intelligent Online Screw Lockin...
-

Green Floor-mounted six-axis collaborative robo...





